We now get into Nontransitive Dice and Other Paradoxes. If there is a transitive relationship between things labelled A, B and C, then if the relationship holds between A and B, and B and C, then it also holds for A and C. For example, if A is heavier than B, and B is heavier than C, then A is heavier than C. One of the most well-known examples of nontransitivity is the old rock-paper-scissors (or, rock-paper-scissors-Spock-lizard) game.

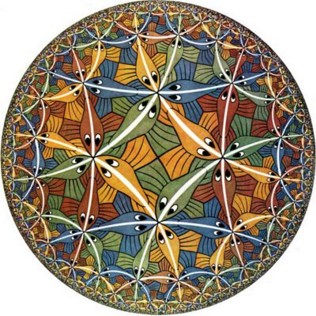
(All rights belong to their owners. Images used here for review purposes only. Efron’s non-transitive dice.)
The above four nontransitive dice were created by statistician Bradley Efron. You allow a partner to choose one of the four dice, and you pick a die from the remaining three, You both toss your dice, and the highest number wins. Even though your partner picks first, you can always find one die from the remaining three that will give you a 2/3’s chance of winning. The reason is that people have a preconceived notion that “more likely to win” is transitive between pairs of dice. In the above illustration, die A beats B, B beats C, C beats D, and D beats A.
Gardner goes on to talk about John Maynard Keynes “principle of indifference” (from A Treatise on Probability) – “If you have no grounds whatever for believing that any one of n mutually exclusive events is more likely to occur than any other, a probability of 1/n is assigned to each.” That is, if you have 6-sided dice that are obviously not loaded or misshaped, each of the faces has a 1/6th chance of coming up on any given throw. With a coin, heads and tails have a 1/2 chance each. The problem is in deciding which events have equal probabilities of happening. Martin gives the following example.
You have a packet of 4 cards, two red, two black. You shuffle them and deal them face down in a row. Two cards are picked at random, such as by putting a coin on the desired ones. What is the probability that both of the selected cards are the same color? One argument is: “There are three equally probable cases: The cards are either both black, both red, or different colors. In two cases, the cards match, so the probability is 2/3.” The second argument is, “There are 4 possibilities, The cards are either both black, both red, or card x is red and y is black, or x is black and y is red. Either they match or they don’t, so the probability is 1/2.” Puzzle for the week: What’s the correct answer?
Or, say you have a covered bucket with red, yellow and blue balls inside, but you don’t know what the distribution is for each of the colors. What are the odds that the first ball you pull out will be blue? Applying the principle of indifference, on the first try, either the ball is blue or it isn’t, so you assign 1/2 to it being blue. Otherwise it will be red or yellow, so the odds for each are 1/4. But if you change the question to what are the odds of the first ball being red, then the probability of getting red first is 1/2 and for blue it’s 1/4, which is a contradiction. The same argument can be used for whether there’s life on Mars or not. The point is that if you don’t know the probabilities for an event, the principle of indifference is going to fail you.
The “most notorious misuse” of this principle was by Blaise Pascal, and is known as Pascal’s Wager. (Taken from the wiki article.)
“”God is, or He is not.” But to which side shall we incline? Reason can decide nothing here. There is an infinite chaos which separated us. A game is being played at the extremity of this infinite distance where heads or tails will turn up. What will you wager? According to reason, you can do neither the one thing nor the other; according to reason, you can defend neither of the propositions…
Yes; but you must wager. It is not optional. You are embarked. Which will you choose then? Let us see. Since you must choose, let us see which interests you least. You have two things to lose, the true and the good; and two things to stake, your reason and your will, your knowledge and your happiness; and your nature has two things to shun, error and misery. Your reason is no more shocked in choosing one rather than the other, since you must of necessity choose. This is one point settled. But your happiness? Let us weigh the gain and the loss in wagering that God is. Let us estimate these two chances. If you gain, you gain all; if you lose, you lose nothing. Wager, then, without hesitation that He is.” In other words, in matters of faith, always bet that the faith holds true. If it doesn’t, you haven’t lost anything (except for all that stuff your faith made you sacrifice along the way.)
The interesting thing is that you can make the same arguments with equal force to any of the other major faiths. And a similar version was written by H. G. Wells in Apropos of Dolores, “While there is a chance of the world getting through its troubles, I hold that a reasonable man has to behave as though he was sure of it. If at the end your cheerfulness is not justified, at any rate you will have been cheerful.”

There’s a lot of reader feedback in the addendum this time, and suggestions for other versions of the nontransitive dice. R. C. H. Chang, from Bath University, England, (at the time), came up with a game using one die. Each face is numbered 1-6, each number is a different color as shown in the chart. The first person picks a color, and the second player selects a different color. The die is thrown, and the person whose color has the highest value wins. Picking the color just to the right of player 1’s in the chart will give you a 5/6 chance of winning.